Robotok alkalmazása az ortopéd sebészetben kissé futurisztikusnak hangzik, azonban ez már a mindennapok része, de nem csak az USA-ban vagy a fejlett nyugat-európai országokban, hanem Magyarországon is. Az eljárás hazai bevezetése és meghonosítása Dr. Domán István Ph.D., FRCS ortopéd sebész nevéhez fűződik, aki az első OMNIBotics robotasszisztált műtéteket egy évvel ezelőtt kezdte. Azóta közel 100 sikeres, robottal végzett műtéten van túl, és rendkívül kedvezőek a tapasztalatai.
„Nekünk, sebészeknek az a legfontosabb, hogy betegeinknek a lehető legjobb műtéti eredményt biztosítsuk, a lehető legkíméletesebb módon, minél gyorsabb felépüléssel – magyarázza a csípő- és térdprotézis specialista, aki több ezer csípő- és térdprotézis beültetést végzett eddig. – A hagyományos műtétekhez vagy egyéb technológiai fejlesztésekhez képest is, mint a személyre szabott eszközök és implantátumok, a robottechnológiával sokkal magasabb, mintegy 96–97 százalékos betegelégedettséget érhetünk el.”

Az USA-ból származó, a sebészeti robotok között is a legjobbnak számító eszköz legfőbb előnye, hogy úgy segíti a térdprotézis beültetést, hogy a térd körüli lágyrészek egyensúlyát – mely a kopást kísérő folyamatokban rendszerint megbomlik – helyreállítja. A legújabb kutatások szerint ugyanis a betegek műtét utáni elégedettsége nagy részben a térd körüli lágyrészek, oldalszalagok egyensúlyától függ. A hagyományos műtétek során a szalagbalansz objektív megítélésére, mérésére nem áll rendelkezésre eszköz, ezért gyakori probléma, hogy a műtéten áteső betegek a nem tökéletes szalagegyensúly miatt panaszosak maradhatnak. Ez a roboteljárással teljesen kiküszöbölhető.
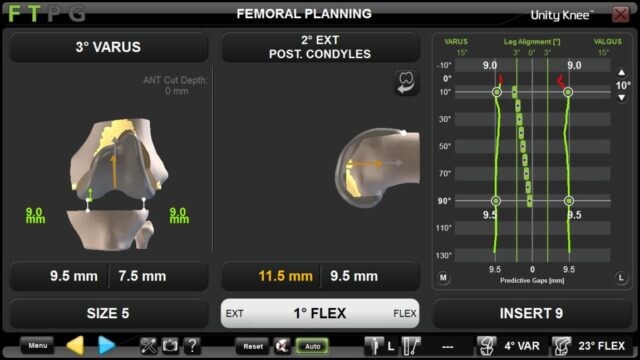
A Nyugat-Európában is újdonságnak számító eljárás során a számítógép a beteg térdéről egy 3D virtuális modellt alakít ki, majd a műtét kezdeti szakaszában egy, a világon egyedülálló szalagfeszességmérőeszköz számszerűsiti a térd körüli lágyrészek, szalagok feszességét a térd mozgásai során. A mért adatokból a számítógép segít meghatározni a protézis komponenseinek olyan „személyre szabott” helyzetét, melyben a szalagok balanszba kerülnek. Az utolsó lépés az így, virtuálisan meghatározott implantátumpozíció milliméteres pontosságú megvalósítása, melynek kivitelezését a robot segíti. „A folyamat rendkívül precíz és biztonságos. Az eljárással operált betegek tökéletes térdfunkciókra, a fájdalmak megszűnésére és gyorsabb felépülésre számíthatnak” – magyarázza a főorvos.
A digitalizáció a csípőműtéteket is segíti. Az OPS (Optimized Positioning System) eljárás az ágyéki gerinc és a medence egyedi mozgásainak digitális analízise alapján ad ajánlást a csípőprotézis-komponensek olyan „személyre szabott” helyzetére, mellyel elkerülhető a legtöbb, a protézis élettartamát negatívan befolyásoló probléma. „A minimálisan invazív műtéti technikák, a rendkívül tartós implantátumok és egyéb technológia fejlesztések ellenére is voltak esetek, amikor idő előtt gond jelentkezett az implantátummal. Ennek hátterében leggyakrabban az állt, hogy nem vettük figyelembe a gerinc mozgásait a műtéti tervezéskor” – magyarázza a főorvos. A műtét során az implantátumok pozicionálása 3D nyomtatással készülő egyedi célzósablonokkal történik, de lehetőség van számítógép-vezérelt eljárásra, ún. sebészeti navigációra is. A legújabb NAVISWISS miniatürizált navigációval a műtéti tervnek megfelelő pozíció rendkívül nagy pontossággal és gyorsan biztosítható. (X)
Bővebb információ itt: http://www.drdoman.hu